Résolution de systèmes d'équations à l'aide de matrices en ligne. La règle de Cramer
- le déterminant de la matrice A est calculé ;
- à travers ajouts algébriques situé matrice inverse A-1 ;
- un modèle de solution est créé dans Excel ;
Instructions. Pour obtenir une solution en utilisant la méthode de la matrice inverse, vous devez spécifier la dimension de la matrice. Ensuite, dans une nouvelle boîte de dialogue, remplissez la matrice A et le vecteur de résultats B.
Voir également Résolution d'équations matricielles.Algorithme de solution
- Le déterminant de la matrice A est calculé. Si le déterminant est nul, alors la solution est terminée. Le système a un nombre infini de solutions.
- Lorsque le déterminant est différent de zéro, la matrice inverse A -1 est trouvée par additions algébriques.
- Le vecteur solution X =(x 1, x 2, ..., x n) est obtenu en multipliant la matrice inverse par le vecteur résultat B.
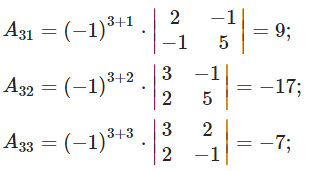
Ajouts algébriques.
| A 1,1 = (-1) 1+1 |
| ∆ 1,1 = (1 (-2)-0 2) = -2 |
| A 1,2 = (-1) 1+2 |
| ∆ 1,2 = -(3 (-2)-1 2) = 8 |
| UNE 1,3 = (-1) 1+3 |
| ∆ 1,3 = (3 0-1 1) = -1 |
| UNE 2,1 = (-1) 2+1 |
| ∆ 2,1 = -(-2 (-2)-0 1) = -4 |
| UNE 2,2 = (-1) 2+2 |
| ∆ 2,2 = (2 (-2)-1 1) = -5 |
| UNE 2,3 = (-1) 2+3 |
| ∆ 2,3 = -(2 0-1 (-2)) = -2 |
| UNE 3,1 = (-1) 3+1 |
| ∆ 3,1 = (-2 2-1 1) = -5 |
| 3 |
| -2 |
| -1 |
XT = (1,0,1)
x1 = -21 / -21 = 1
x2 = 0 / -21 = 0
x3 = -21 / -21 = 1
Examen:
2 1+3 0+1 1 = 3
-2 1+1 0+0 1 = -2
1 1+2 0+-2 1 = -1
Considérons système d'équations algébriques linéaires(SLAU) relativement n inconnu x 1 ,x 2 , ..., x n :
Ce système sous une forme « réduite » peut s’écrire comme suit :
S n je = 1 un je x j =b je , je=1,2, ..., n.
Conformément à la règle de multiplication matricielle, le système considéré équations linéaires peut être écrit en forme matricielle Hache=b, Où
 ,
,.
,
,.
Matrice UN, dont les colonnes sont les coefficients des inconnues correspondantes et les lignes sont les coefficients des inconnues dans l'équation correspondante est appelée matrice du système. Matrice de colonnes b, dont les éléments sont les membres droits des équations du système, est appelé la matrice du membre droit ou simplement côté droit du système. Matrice de colonnes x , dont les éléments sont les inconnues inconnues, est appelé solution système.
Un système d'équations algébriques linéaires écrites sous la forme Hache=b, est équation matricielle.
Si la matrice du système non dégénéré, alors il a une matrice inverse et alors la solution du système est Hache=b est donné par la formule :
x=UNE -1 b.
Exemple Résoudre le système  méthode matricielle.
méthode matricielle.
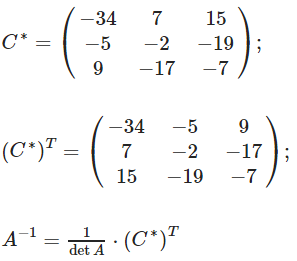
Solution trouvons la matrice inverse de la matrice des coefficients du système

Calculons le déterminant en développant le long de la première ligne :

Depuis Δ ≠ 0 , Que UN -1 existe.

La matrice inverse a été trouvée correctement.
Trouvons une solution au système 
Ainsi, x 1 = 1,x 2 = 2,x 3 = 3 .
Examen: 
7. Le théorème de Kronecker-Capelli sur la compatibilité d'un système d'équations algébriques linéaires.
Système d'équations linéaires a la forme :
une 21 x 1 + une 22 x 2 +... + une 2n x n = b 2, (5.1)
un m1 x 1 + un m1 x 2 +... + un mn x n = b m.
Ici a i j et b i (i = ; j = ) sont donnés, et x j sont des nombres réels inconnus. En utilisant la notion de produit de matrices, on peut réécrire le système (5.1) sous la forme :
où A = (ai j) est une matrice constituée de coefficients pour les inconnues du système (5.1), appelée matrice du système, X = (x 1 , x 2 ,..., x n) T , B = (b 1 , b 2 ,..., b m) T sont des vecteurs colonnes composés respectivement d'inconnues x j et de termes libres b i .
Collecte commandée n les nombres réels (c 1 , c 2 ,..., c n) sont appelés solution système(5.1), si du fait de la substitution de ces nombres au lieu des variables correspondantes x 1, x 2,..., x n, chaque équation du système se transforme en une identité arithmétique ; en d'autres termes, s'il existe un vecteur C= (c 1 , c 2 ,..., c n) T tel que AC B.
Le système (5.1) est appelé articulation, ou soluble, s'il a au moins une solution. Le système s'appelle incompatible, ou insoluble, s'il n'a pas de solutions.
 ,
,
formé en affectant une colonne de termes libres au côté droit de la matrice A est appelé matrice étendue du système.
La question de la compatibilité du système (5.1) est résolue par le théorème suivant.
Théorème de Kronecker-Capelli . Un système d'équations linéaires est cohérent si et seulement si les rangs des matrices A et A coïncident, c'est-à-dire r(UNE) = r(UNE) = r.
Pour l’ensemble M des solutions du système (5.1) il y a trois possibilités :
1) M = (dans ce cas le système est incohérent) ;
2) M est constitué d'un élément, c'est-à-dire le système a une solution unique (dans ce cas le système est appelé certain);
3) M se compose de plus d'un élément (alors le système est appelé incertain). Dans le troisième cas, le système (5.1) possède une infinité de solutions.
Le système n’a de solution unique que si r(A) = n. Dans ce cas, le nombre d’équations n’est pas moins de nombre inconnues (mn); si m>n, alors m-n équations sont des conséquences des autres. Si 0 Pour résoudre un système arbitraire d'équations linéaires, vous devez être capable de résoudre des systèmes dans lesquels le nombre d'équations est égal au nombre d'inconnues - ce qu'on appelle Systèmes de type Cramer: une 11 x 1 + une 12 x 2 +... + une 1n x n = b 1, une 21 x 1 + une 22 x 2 +... + une 2n x n = b 2, (5.3) ...
... ... ...
... ... une n1 x 1 + une n1 x 2 +... + une nn x n = b n . Les systèmes (5.3) sont résolus de l'une des manières suivantes : 1) la méthode de Gauss, ou la méthode d'élimination des inconnues ; 2) selon les formules de Cramer ; 3) méthode matricielle. Exemple 2.12. Explorez le système d'équations et résolvez-le s'il est cohérent : 5x 1 - x 2 + 2x 3 + x 4 = 7, 2x 1 + x 2 + 4x 3 - 2x 4 = 1, x 1 - 3x 2 - 6x 3 + 5x 4 = 0. Solution. Nous écrivons la matrice étendue du système :
Calculons le rang de la matrice principale du système. Il est évident que, par exemple, le mineur du second ordre dans le coin supérieur gauche = 7 0 ; les mineurs du troisième ordre le contenant sont égaux à zéro : Par conséquent, le rang de la matrice principale du système est 2, soit r(A) = 2. Pour calculer le rang de la matrice étendue A, considérons le mineur limitrophe cela signifie que le rang de la matrice étendue r(A) = 3. Puisque r(A) r(A), le système est incohérent. Méthode matricielle Solutions SLAU appliqué à la résolution de systèmes d'équations dans lesquels le nombre d'équations correspond au nombre d'inconnues. La méthode est mieux utilisée pour résoudre des systèmes d’ordre inférieur. La méthode matricielle pour résoudre des systèmes d'équations linéaires est basée sur l'application des propriétés de la multiplication matricielle. Cette méthode, en d'autres termes méthode matricielle inverse, ainsi appelé parce que la solution se réduit à une équation matricielle ordinaire, pour résoudre laquelle vous devez trouver la matrice inverse. Méthode de solution matricielle Un SLAE dont le déterminant est supérieur ou inférieur à zéro est le suivant : Supposons qu'il existe un SLE (système d'équations linéaires) avec n inconnu (sur un champ arbitraire) : Cela signifie qu’il peut être facilement converti sous forme matricielle : AX=B, Où UN— la matrice principale du système, B Et X— colonnes de termes libres et de solutions du système, respectivement : Multiplions cette équation matricielle en partant de la gauche par A−1— matrice inverse à matrice UNE : UNE −1 (AX)=UNE −1 B. Parce que UNE−1 UNE=E, Moyens, X = UNE −1 B. Le côté droit de l’équation donne la colonne de solution du système initial. La condition d'applicabilité de la méthode matricielle est la non-dégénérescence de la matrice UN. Une condition nécessaire et suffisante pour cela est que le déterminant de la matrice ne soit pas égal à zéro UN: detA≠0. Pour système homogène d'équations linéaires, c'est-à-dire si vecteur B=0, la règle inverse est vraie : le système AX=0 il existe une solution non triviale (c'est-à-dire non égale à zéro) uniquement lorsque detA=0. Cette connexion entre les solutions de systèmes homogènes et inhomogènes d'équations linéaires est appelée Alternative à Fredholm. Ainsi, la solution du SLAE par la méthode matricielle s'effectue selon la formule On sait que pour une matrice carrée UN commande n sur n il existe une matrice inverse A−1 seulement si son déterminant est non nul. Ainsi, le système néquations algébriques linéaires avec n On résout les inconnues par la méthode matricielle uniquement si le déterminant de la matrice principale du système n'est pas égal à zéro. Malgré le fait qu'il existe des limites à l'applicabilité d'une telle méthode et aux difficultés de calcul pour de grandes valeurs de coefficients et de systèmes d'ordre élevé, la méthode peut être facilement mise en œuvre sur un ordinateur. Vérifions d’abord si le déterminant de la matrice des coefficients des SLAE inconnus n’est pas égal à zéro. Maintenant nous trouvons matrice syndicale, transposez-le et remplacez-le dans la formule pour déterminer la matrice inverse. Remplacez les variables dans la formule : On trouve maintenant les inconnues en multipliant la matrice inverse et la colonne de termes libres. Donc, x=2 ; y = 1 ; z=4. Lorsque vous passez de la forme habituelle de SLAE à la forme matricielle, soyez prudent avec l'ordre des variables inconnues dans les équations du système. Par exemple: Il NE PEUT PAS être écrit comme suit : Il faut d'abord ordonner les variables inconnues dans chaque équation du système et ensuite seulement procéder à la notation matricielle : De plus, vous devez être prudent avec la désignation des variables inconnues, au lieu de cela x1, x 2 , …, x n il peut y avoir d'autres lettres. Par exemple: sous forme matricielle on l'écrit comme ceci : La méthode matricielle est meilleure pour résoudre des systèmes d'équations linéaires dans lesquels le nombre d'équations coïncide avec le nombre de variables inconnues et le déterminant de la matrice principale du système n'est pas égal à zéro. Lorsqu'il y a plus de 3 équations dans un système, trouver la matrice inverse nécessitera plus d'efforts de calcul. Par conséquent, dans ce cas, il est conseillé d'utiliser la méthode de résolution gaussienne. Les équations en général, les équations algébriques linéaires et leurs systèmes, ainsi que les méthodes pour les résoudre, occupent une place particulière en mathématiques, tant théoriques qu'appliquées. Cela est dû au fait que la grande majorité des problèmes physiques, économiques, techniques et même pédagogiques peuvent être décrits et résolus à l'aide de diverses équations et de leurs systèmes. Récemment, la modélisation mathématique a gagné en popularité parmi les chercheurs, les scientifiques et les praticiens dans presque tous les domaines, ce qui s'explique par ses avantages évidents par rapport à d'autres méthodes bien connues et éprouvées pour étudier des objets de diverses natures, en particulier les soi-disant complexes. systèmes. Il existe une grande variété de définitions différentes d'un modèle mathématique données par les scientifiques à différentes époques, mais à notre avis, la plus réussie est la déclaration suivante. Un modèle mathématique est une idée exprimée par une équation. Ainsi, la capacité de composer et de résoudre des équations et leurs systèmes fait partie intégrante d'un spécialiste moderne. Pour résoudre des systèmes d'équations algébriques linéaires, les méthodes les plus couramment utilisées sont Cramer, Jordan-Gauss et la méthode matricielle. La méthode de solution matricielle est une méthode permettant de résoudre des systèmes d'équations algébriques linéaires avec un déterminant non nul à l'aide d'une matrice inverse. Si nous écrivons les coefficients des quantités inconnues xi dans la matrice A, collectons les quantités inconnues dans la colonne vectorielle X et les termes libres dans la colonne vectorielle B, alors le système d'équations algébriques linéaires peut être écrit sous la forme équation matricielle suivante A · X = B, qui a une solution unique uniquement lorsque le déterminant de la matrice A n'est pas égal à zéro. Dans ce cas, la solution du système d’équations peut être trouvée de la manière suivante X = UN-1 · B, Où UN-1 - matrice inverse. La méthode de solution matricielle est la suivante. Donnons-nous un système d'équations linéaires avec n inconnu: Il peut être réécrit sous forme matricielle : HACHE =
B, Où UN- la matrice principale du système, B Et X- colonnes de termes libres et de solutions du système, respectivement : Multiplions cette équation matricielle en partant de la gauche par UN-1 - matrice inverse de la matrice UN: UN -1 (HACHE) = UN -1 B Parce que UN -1 UN = E, nous obtenons X=A -1 B. Le côté droit de cette équation donnera la colonne de solution du système d’origine. La condition d'applicabilité de cette méthode (ainsi que l'existence générale d'une solution à un système inhomogène d'équations linéaires avec un nombre d'équations égal au nombre d'inconnues) est la non-dégénérescence de la matrice UN. Une condition nécessaire et suffisante pour cela est que le déterminant de la matrice ne soit pas égal à zéro UN:dét UN≠ 0. Pour un système homogène d'équations linéaires, c'est-à-dire lorsque le vecteur B = 0
, voire la règle inverse : le système HACHE =
0 a une solution non triviale (c'est-à-dire non nulle) uniquement si det UN= 0. Une telle connexion entre les solutions de systèmes d'équations linéaires homogènes et inhomogènes est appelée l'alternative de Fredholm. Exemple solutions à un système inhomogène d'équations algébriques linéaires. Assurons-nous que le déterminant de la matrice, composé des coefficients des inconnues du système d'équations algébriques linéaires, n'est pas égal à zéro. L'étape suivante consiste à calculer les compléments algébriques pour les éléments de la matrice constituée des coefficients des inconnues. Ils seront nécessaires pour trouver la matrice inverse. (parfois cette méthode est également appelée méthode matricielle ou méthode matricielle inverse) nécessite une familiarisation préalable avec un concept tel que la forme matricielle de notation SLAE. La méthode matricielle inverse est destinée à résoudre les systèmes d'équations algébriques linéaires dans lesquels le déterminant de la matrice du système est différent de zéro. Naturellement, cela suppose que la matrice du système soit carrée (la notion de déterminant n'existe que pour les matrices carrées). L'essence de la méthode matricielle inverse peut s'exprimer en trois points : Tout SLAE peut être écrit sous forme matricielle sous la forme $A\cdot X=B$, où $A$ est la matrice du système, $B$ est la matrice des termes libres, $X$ est la matrice des inconnues. Laissez la matrice $A^(-1)$ exister. Multiplions les deux côtés de l'égalité $A\cdot X=B$ par la matrice $A^(-1)$ à gauche : $$A^(-1)\cdot A\cdot X=A^(-1)\cdot B.$$ Puisque $A^(-1)\cdot A=E$ ($E$ est la matrice identité), l'égalité écrite ci-dessus devient : $$E\cdot X=A^(-1)\cdot B.$$ Puisque $E\cdot X=X$, alors : $$X=A^(-1)\cdot B.$$ Exemple n°1 Résolvez le SLAE $ \left \( \begin(aligned) & -5x_1+7x_2=29;\\ & 9x_1+8x_2=-11. \end(aligned) \right.$ en utilisant la matrice inverse. $$ A=\left(\begin(array) (cc) -5 & 7\\ 9 & 8 \end(array)\right);\; B=\left(\begin(array) (c) 29\\ -11 \end(array)\right);\; X=\left(\begin(array) (c) x_1\\ x_2 \end(array)\right). $$ Trouvons la matrice inverse de la matrice système, c'est-à-dire Calculons $A^(-1)$. Dans l'exemple n°2 $$ A^(-1)=-\frac(1)(103)\cdot\left(\begin(array)(cc) 8 & -7\\ -9 & -5\end(array)\right) . $$ Remplaçons maintenant les trois matrices ($X$, $A^(-1)$, $B$) par l'égalité $X=A^(-1)\cdot B$. Ensuite, nous effectuons une multiplication matricielle $$ \left(\begin(array) (c) x_1\\ x_2 \end(array)\right)= -\frac(1)(103)\cdot\left(\begin(array)(cc) 8 & -7\\ -9 & -5\end(array)\right)\cdot \left(\begin(array) (c) 29\\ -11 \end(array)\right)=\\ =-\frac (1)(103)\cdot \left(\begin(array) (c) 8\cdot 29+(-7)\cdot (-11)\\ -9\cdot 29+(-5)\cdot (- 11) \end(array)\right)= -\frac(1)(103)\cdot \left(\begin(array) (c) 309\\ -206 \end(array)\right)=\left( \begin(array) (c) -3\\ 2\end(array)\right). $$ Nous avons donc l'égalité $\left(\begin(array) (c) x_1\\ x_2 \end(array)\right)=\left(\begin(array) (c) -3\\ 2\end( tableau )\right)$. De cette égalité on a : $x_1=-3$, $x_2=2$. Répondre: $x_1=-3$, $x_2=2$. Exemple n°2 Résoudre SLAE $ \left\(\begin(aligned) & x_1+7x_2+3x_3=-1;\\ & -4x_1+9x_2+4x_3=0;\\ & 3x_2+2x_3=6. \end(aligned)\right .$ en utilisant la méthode de la matrice inverse. Écrivons la matrice du système $A$, la matrice des termes libres $B$ et la matrice des inconnues $X$. $$ A=\left(\begin(array) (ccc) 1 & 7 & 3\\ -4 & 9 & 4 \\0 & 3 & 2\end(array)\right);\; B=\left(\begin(array) (c) -1\\0\\6\end(array)\right);\; X=\left(\begin(array) (c) x_1\\ x_2 \\ x_3 \end(array)\right). $$ C'est maintenant au tour de trouver la matrice inverse de la matrice système, c'est-à-dire trouver $A^(-1)$. Dans l'exemple n°3 de la page dédiée à la recherche de matrices inverses, la matrice inverse a déjà été trouvée. Utilisons le résultat final et écrivons $A^(-1)$ : $$ A^(-1)=\frac(1)(26)\cdot \left(\begin(array) (ccc) 6 & -5 & 1 \\ 8 & 2 & -16 \\ -12 & - 3 & 37\end(tableau)\right). $$ Remplaçons maintenant les trois matrices ($X$, $A^(-1)$, $B$) par l'égalité $X=A^(-1)\cdot B$, puis effectuons une multiplication matricielle sur le côté droit de cette égalité. $$ \left(\begin(array) (c) x_1\\ x_2 \\ x_3 \end(array)\right)= \frac(1)(26)\cdot \left(\begin(array) (ccc) 6 & -5 & 1 \\ 8 & 2 & -16 \\ -12 & -3 & 37\end(array) \right)\cdot \left(\begin(array) (c) -1\\0\ \6\end(array)\right)=\\ =\frac(1)(26)\cdot \left(\begin(array) (c) 6\cdot(-1)+(-5)\cdot 0 +1\cdot 6 \\ 8\cdot (-1)+2\cdot 0+(-16)\cdot 6 \\ -12\cdot (-1)+(-3)\cdot 0+37\cdot 6 \end(array)\right)=\frac(1)(26)\cdot \left(\begin(array) (c) 0\\-104\\234\end(array)\right)=\left( \begin(array) (c) 0\\-4\\9\end(array)\right) $$ Nous avons donc l'égalité $\left(\begin(array) (c) x_1\\ x_2 \\ x_3 \end(array)\right)=\left(\begin(array) (c) 0\\-4 \ \9\end(tableau)\right)$. De cette égalité on a : $x_1=0$, $x_2=-4$, $x_3=9$. .
.



![]() . Ou bien, la solution au SLAE se trouve en utilisant matrice inverse A−1.
. Ou bien, la solution au SLAE se trouve en utilisant matrice inverse A−1.Un exemple de résolution d’un SLAE non homogène.